BEV(Bird’s Eye View,鸟瞰图)是一种将三维空间信息投影到二维平面的视角,通过从俯视的角度观察场景,提供一种直观的环境感知方式。这种技术广泛应用于自动驾驶、智能交通、地图制作等领域,具有显著的优势和应用价值。
1. BEV的定义与原理
BEV的核心是通过算法将多传感器(如摄像头、雷达、激光雷达等)采集的二维或三维数据,统一转换为一个俯视视角的三维空间表示。这种视角类似于鸟儿从空中俯瞰地面的场景,因此被称为“鸟瞰图”。BEV技术通过将传感器数据融合到一个统一的三维空间中,解决了传统二维视角中常见的遮挡和重叠问题,从而提高了物体检测和场景感知的精度。
BEV的实现通常分为两个阶段:
- 第一阶段:数据预处理
将来自不同传感器的原始数据(如图像、雷达点云等)进行校正和变换,使其能够以统一的视角呈现。例如,特斯拉通过HydraNet共享主干网络提取特征,然后将这些特征映射到预设的三维空间中。 - 第二阶段:数据融合与建模
将多模态数据(如激光雷达、雷达、摄像头等)融合到一个统一的BEV空间中,利用深度学习模型(如Transformer)对时间维度和空间维度的特征进行整合,从而生成全局的三维空间信息。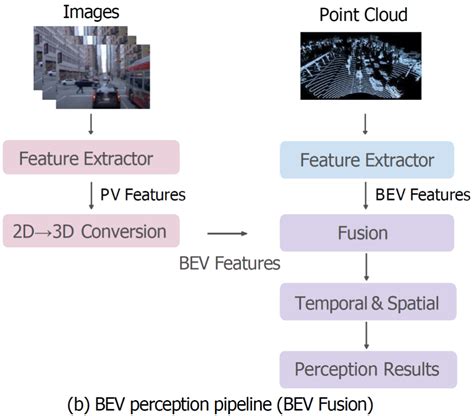
2. BEV的主要优势
BEV技术相较于传统二维视角具有以下显著优势:
- 消除遮挡与重叠:通过统一视角,可以有效避免遮挡问题,提高物体检测的准确性和稳定性。
- 增强感知能力:BEV视角能够更直观地展示物体的三维信息,如高度、宽度和深度,从而提升对复杂场景的感知能力。
- 多任务融合:BEV可以同时处理动态目标(如行人、车辆)和静态目标(如车道线、道路结构)的信息,实现多任务的联合感知。
- 降低计算成本:相比传统点云方法,BEV通过二维图像直接生成三维信息,减少了计算复杂度,适合在资源受限的设备上部署。
3. BEV在自动驾驶中的应用
BEV在自动驾驶领域具有重要价值,主要应用于以下几个方面:
- 环境感知:通过BEV视角,可以更全面地感知车辆周围的环境,包括动态目标和静态目标,为自动驾驶决策提供支持。
- 路径规划:BEV能够提供全局的三维空间信息,帮助自动驾驶车辆进行路径规划和避障。
- 3D目标检测:BEV视角下的目标检测更加精准,能够有效识别遮挡或交叉的物体。
- 多传感器融合:BEV通过融合激光雷达、摄像头和雷达等多模态数据,提高了感知的鲁棒性和准确性。
4. BEV技术的挑战与发展
尽管BEV技术在自动驾驶领域具有显著优势,但其发展仍面临一些挑战:
- 数据融合的复杂性:多传感器数据融合需要精确的校准和同步,这对算法提出了较高的要求。
- 计算资源需求:尽管BEV降低了部分计算成本,但在实时应用中,其计算复杂度仍较高,需要进一步优化。
- 模型泛化能力:BEV模型在不同场景下的表现可能存在差异,需要进一步提升模型的泛化能力。
5. BEV技术的未来展望
随着深度学习技术的不断进步,BEV技术在自动驾驶领域的应用将更加广泛和深入。例如,结合Transformer等先进的神经网络架构,BEV模型能够更好地处理长距离依赖问题,提升感知精度和稳定性。此外,通过多模态融合和时空特征提取,BEV技术将为自动驾驶系统提供更强大的决策支持能力。
BEV是一种将三维空间信息转化为俯视视角的先进技术,其在自动驾驶、智能交通等领域具有广泛的应用前景。通过消除遮挡、增强感知能力和多任务融合,BEV技术为自动驾驶系统的环境感知和决策提供了强大的支持,同时也推动了智能驾驶技术的进一步发展。
声明:文章均为AI生成,请谨慎辨别信息的真伪和可靠性!